炒股加杠杆吗 打破波士顿动力空翻专利后,国产人形机器人左手拧螺丝,右手咖啡拉花
本次交易完成后,公司全资子公司祥源堃鹏将持有宜章莽山景区旅游开发有限公司84%股权,莽山旅游将成为公司的控股子公司,纳入公司合并报表范围。
【免责声明】本文仅代表作者本人观点,与和讯网无关。和讯网站对文中陈述、观点判断保持中立,不对所包含内容的准确性、可靠性或完整性提供任何明示或暗示的保证。请读者仅作参考,并请自行承担全部责任。邮箱:news_center@staff.hexun.com
据了解,3C场景的落地应用正在开发中,预计年底将在产线开展试运行。全球首次以「电驱机器人」打破波士顿动力空翻专利的那家机器人公司,不藏了!
旗下人形机器人的更多技能技巧,被摆到台前。

其实,它还会一些精细活:做咖啡。

而且是全球首个实现自主咖啡拉花的人形机器人。
只见他左右晃动拿着拉花杯(打奶缸)的手腕,不紧不慢:
然后你将得到:
然后事了拂衣去,深藏功与名:
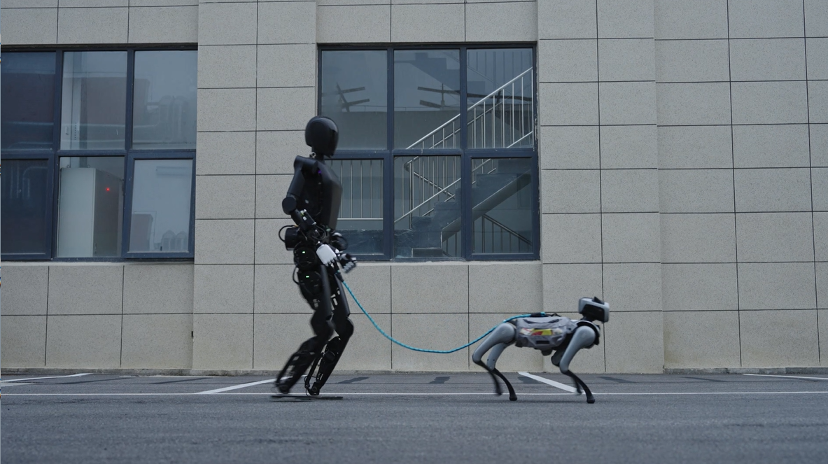
除了在咖啡馆中进行高精度自主咖啡拉花,它还能为工厂员工分发夜宵、在室内外场景担任领路员。
甚至能帮咱遛狗。
正式介绍一下,背后公司MagicLab,专注于通用机器人技术和AI技术,听说走的还是全球化路线。
人形机器人只是它们产品线里的一员,仿生四足机器人、工业四足机器人、通用人形机器人等,都是这家公司计划中(并且正在推进)的一部分。
瞄准的落地场景也很广泛,覆盖家庭、工业、商业等。
据了解,3C场景的落地应用正在开发中,预计年底将在产线开展试运行。

在生产车间内执行清洁设备的性能测试,效率提高了30%,同时减少了70%的人工干预需求。

自研伺服电机,大模型也都用上了
MagicLab团队主攻机器人核心力矩电机关节、机械臂、足式机器人等通用机器人核心技术。
团队认为,通用机器人的终极形态一定是人形机器人。
从技术上来讲,团队主要专注于解决硬件和算法两方面的难题。
硬件方面,团队选择自研伺服电机以及核心零部件,以此来做能力延伸。
力矩电机关节模组设计致⼒于提⾼电机的功率密度⽐和转矩密度,包括谐波模组关节、直线模组关节,以及⼩型和微型伺服单元。
⽬前团队拥有的电机系列,覆盖了从10N.m到500N.m的扭矩范围。
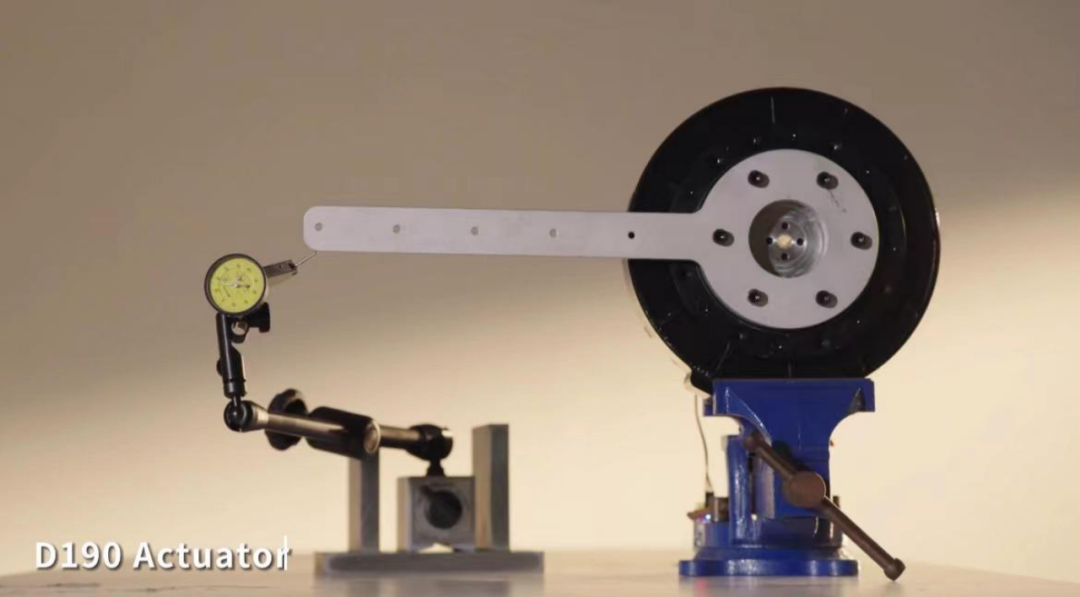
之前让电驱人形机器人完成空翻,就得益于MagicLab全新的关节设计。
自研D190关节模组额定输出力矩达150Nm,最高输出则超过525Nm,可在110RPM的转速下工作,高功率的关节配合上为空翻特别设计的驱动器,能够应对空翻过程中反电势波动产生的瞬间高电压和低压。
机器人的机械结构设计中还调整了机器人的重量分布,将大部分重量集中在大腿根部,减少了摆动腿部过程中的惯量。
在跳跃和翻转过程中机器人可快速调整重心,保持稳定并成功着陆,还能保持敏捷性和精确控制。
自研还有一个好处是可以整体考虑软件与硬件的协同优化,用相对低成本的硬件发挥出可用的运控能力,不断迭代落地,降低成本。
算法上,团队应⽤多模态的⼤模型,基于⼤模型的通识能力,能够应对复杂场景中的多任务的物理表征感知和客观物理事实理解,并形成类人的行为决策。
全身控制大模型⽅⾯,基于强化学习的运控小模型和基于技能库的操作小模型,可以充分解耦环境和对象、自身执行体、操作物理特性,以做出仿人化的柔顺、鲁棒、通用的全身控制。
最后,通过图形化界⾯,结合以上两个⼤模型,⽤户可以轻松设计和部署机器⼈应⽤,实现多模态的⼈机交互、场景任务感知与⾃主决策。
从具体例子来看,机器人咖啡拉花要克服的难点,不仅是要会简单拉花,团队表示之后还想让机器人能复刻咖啡大师的手艺。
它需要在开放空间里与人进行交互,这意味着它所处的空间位置和运动轨迹会有许多不确定性,同时需要识别不同材质及尺寸的工具。
作为人形产业链中的核心零部件,灵巧手也是团队重点开发的硬件,该方向团队采取了分代迭代的策略:
成熟一代、预研一代、储备一代。
目前已经可以实现亚毫米级的定位精度和数千克的负载能力。
基础版本是11自由度设计,其中有6个主动自由度。拇指分布两个主动⾃由度,可⽤于弯曲和侧摆,使得灵巧⼿可以模仿⼈类⼿部的各种动作,包括握拳、张开、指向、捏取、拨弄等。
此外还引⼊了⼒控制和指尖触觉感知,通过本体的⼒矩传感器反馈来实现精确控制。⽆论是什么形状、⼤⼩和材质的物体,哪怕是脆弱、滑动或者变形的物品,也能轻松抓取。
之后团队计划引入触觉感知和更高自由度的设计。
定义人形机器人的「M0-M4」
一番交谈下来,MagicLab团队的未来计划和目标还是非常明确的。
面对当下的发展阶段以及未来观望,MagicLab将人形机器人场景落地级别分为M0-M4五个阶段。
咱们把这五个阶段的划分标准掰开了说说。
首先是M0。
M0是实验室产品,没有面向明确的场景。
从研发角度,很多人可能会不计成本地去堆砌一些软硬件,没有做任何清晰的成本控制,即使有人从科研的角度进行购买,但也没有办法真正进行商业落地。
到了M1,这阶段的人形机器人比较像是一个实习生,针对特定的商用和工业场景的局部做一些应用。
比如让人形机器人倒一杯水,跳一支舞,做一杯带拉花的咖啡。
从研发角度来看,M1阶段已经可以基于特定场景、特定任务等需求做产品和成本的优化;但泛化性远远不足,因此不太能称得上是一个真正实用的产品,也很容易陷入商业化难题。
M2,则可以被定义为熟练工了。
这个级别的产品需要能在特定的商用和工业场景中,实现场景闭环,也就是真正能替人去干一些事。
采购方可以算一笔采用人形机器人硬件和人工成本的经济账,来判断商业化可行性。
也是这一阶段,人形机器人才真正走到了商业化门口。

MagicLab把M3阶段的人形机器人定义为“像一个保姆”。
这时候,人形机器人已经可以进入家庭,完成陪伴、家务、养老等任务。
“但我们充分认知到,要实现这个目标之前,还需要对大模型及硬件的泛化能力做充分提升。”MagicLab研发负责人周扬说,要到达这个阶段,整个行业都还要花费巨量时间去探索。
最高等级M4,MagicLab称之为物理世界的Siri,即真正的通用机器人。
可以实现一机多用——具体有多多用,完全取决于人形机器人的硬件水平。
不过,M4级别的人形机器人必须通用、完全融入社会,说不定闲时可以出门打工赚钱(???)。

MagicLab团队告诉我们,长远目标是做M3到M4级别的产品。
目前自家旗下的人形机器人目前处于M1向M2进化的过渡阶段,同时着力推动M2级别的落地。
让机器人走出实验室
MagicLab成立于去年12月中旬。
迄今为止,已经发展成了100多人的团队。成员来自全球,其中80%以上为研发人员。
团队主攻机器人核心力矩电机关节、机械臂、足式机器人等通用机器人核心技术,在算法层面也小有成就,如运控算法、导航算法、视觉与AI算法等。
同时具备自主研发及生产制造机器人能力、多场景落地能力以及量产交付能力。

在与MagicLab研发负责人周扬及首席战略官Ivan的交流中,量子位获悉,该团队一心一意就一件事——
发力让机器人真正能实现“替人”,在特定商业场景中实现闭环落地。
包括在我们询问团队优势时,周扬也表示:
除了深耕技术研究,我们同样重视技术×商业的力量,不断地探索技术的应用场景、做好产品的工程化。
我们相信,随着灵巧手、人形机器人等通用本体的成熟量产,通用人形机器人一定也能获得商业价值上的正向反馈。
整个团队非常希望能够用机器人技术结合产业,把机器人的价值成指数级的放大。
并且,因为MagicLab觉得单纯做机器人设备公司,想象力过于有限,所以他们用“机器人+”来对自己定位。
就像当年的互联网+一样炒股加杠杆吗,把技术带到千行百业,解决实际问题。